
S7-1500 PLClerde Teknoloji Fonksiyonları ve Nesneleri Part 1/

|
Teknoloji nesneleri |
SIMATIC S7-1500 |
SIMATIC S7-1500T |
Teknoloji
nesnesi başına kaynak gereksinimleri |
|
Hız kontrollü eksen |
X |
X |
40 |
|
Konumlandırma
ekseni |
X |
X |
80 |
|
Senkron eksen |
X |
X |
160 |
|
Harici kodlayıcı |
X |
X |
80 |
|
Ölçüm girişi |
X |
X |
40 |
|
Çıkış kamı |
X |
X |
20 |
|
Kam izi |
X |
X |
160 |
|
Kam |
--- |
X |
2* |
|
Kinematik |
--- |
X |
30* |
|
Ana değer proxy'si |
--- |
X |
|
|
Teknoloji fonksiyonları |
SIMATIC S7-1500 |
SIMATIC S7-1500T |
|
Teknoloji nesnelerini etkinleştirme, devre dışı bırakma |
X |
X |
|
Alarmları onaylayın, teknoloji
nesnesini yeniden başlatın |
X |
X |
|
Referans teknoloji nesneleri,
ayar referans noktası |
X |
X |
|
Ekseni duraklat |
X |
X |
|
Ekseni tam konumlandırın |
X |
X |
|
Ekseni kısmi konumlandırın |
X |
X |
|
Ekseni ayarlanan hızda / süratte
hareket ettirme |
X |
X |
|
Ekseni jog modunda hareket
ettirme |
X |
X |
|
Konumlandırma ekseni çakışması |
X |
X |
|
Alternatif kodlayıcıyı işlevsel olarak aktif kodlayıcı olarak ayarlama |
--- |
X |
|
Ekseni tutma ve devre dışı bırakma |
X |
X |
|
Donanım limit anahtarını etkinleştirme / devre dışı bırakma |
X |
X |
|
Kontrol kelimesi 1 ve 2'nin
bitlerini kontrol etme |
X |
X |
|
Bir kerelik ölçüm başlat |
X |
X |
|
Döngüsel ölçümü başlat |
X |
X |
|
Aktif ölçümü iptal et |
X |
X |
|
Çıkış kamını etkinleştirme / devre dışı bırakma |
X |
X |
|
Kam parçasını etkinleştirme / devre dışı bırakma |
X |
X |
|
Dişlileri başlat |
X |
X |
|
Belirtilen senkron konumlarla
vites değiştirmeye başlayın |
--- |
X |
|
Vitesden çık |
--- |
X |
|
Ana değerin aşağıdaki
eksende mutlak kayması |
--- |
X |
|
Ana değerin aşağıdaki
eksende göreli değişimi |
--- |
X |
|
Kameraya başla |
--- |
X |
|
Kameradan çık |
--- |
X |
|
Senkron işlemi simüle et |
--- |
X |
|
Ek ana değeri belirtme |
--- |
X |
|
Kam ara değerinin hesaplanması |
--- |
X |
|
Bir kamın slave değerinin okunması |
--- |
X |
|
Bir kameranın ana değerinin okunması |
--- |
X |
|
Hareket ayar noktalarını
belirleme |
--- |
X |
|
Kuvvet / tork sınırlama / sabit
durdurma algılamayı etkinleştirme ve devre dışı bırakma |
X |
X |
|
Katkı torkunu belirleme |
X |
X |
|
Üst ve alt tork sınırlarını
belirtme |
X |
X |
|
Kinematik hareket kontrolünü
kesme |
--- |
X |
|
Kinematik hareket kontrolünü
devam ettirme |
--- |
X |
|
Kinematik hareketini durdurma |
--- |
X |
|
Doğrusal hareket ile kinematiği pozisyonlandırma |
--- |
X |
|
Doğrusal hareket ile kinematiği kısmi pozisyonlandırma |
--- |
X |
|
Dairesel hareket ile kinematiği pozisyonlandırma |
--- |
X |
|
Dairesel hareket ile kinematiği kısmi pozisyonlandırma |
--- |
X |
|
Kinematiği senkronize "noktadan
noktaya" hareketiyle taşıma, Tam |
--- |
X |
|
Kinematiği senkronize "noktadan noktaya"
hareketiyle taşıma, Bağıl |
--- |
X |
|
Konveyör izlemeyi başlat |
--- |
X |
|
Çalışma alanı bölgelerini tanımlama |
--- |
X |
|
Kinematik bölgeleri tanımlama |
--- |
X |
|
Çalışma alanı bölgelerini etkinleştirme |
--- |
X |
|
Çalışma alanı bölgelerini devre dışı bırakma |
--- |
X |
|
Kinematik bölgeleri etkinleştirme |
--- |
X |
|
Kinematik bölgelerini devre dışı bırakma |
--- |
X |
|
Aracı yeniden tanımla |
--- |
X |
|
Etkin aracı değiştir |
--- |
X |
|
Nesne koordinat sistemini
yeniden tanımlayın |
--- |
X |
|
Eksen koordinatlarını kartezyen
koordinatlara dönüştürme |
--- |
X |
|
Kartezyen koordinatları eksen
koordinatlarına dönüştürme |
--- |
X |
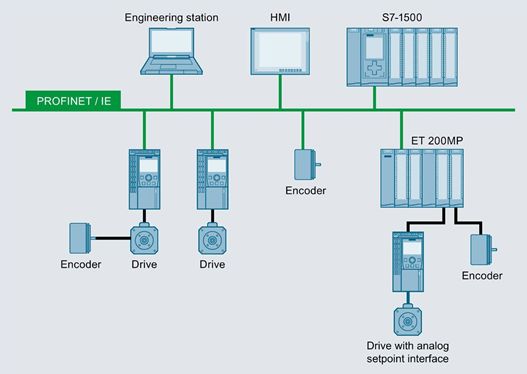
İletişim
.png)